




优化方法·无约束非线性优化
更新时间:2024-07-01 13:27:09
就是求一个函数的最小值问题。并且计算机不适合用解析解。
我们可以从一个初始点出发,一步一步走到期望的最优点,这就要求求出每一步往哪里走,走多长,从而把这种优化问题分解成求方向和求步长两个问题,求步长的时候,可以认为函数只有步长一个自变量,所以又称为一维搜索。
附上我写的如下一段代码:求方向可以选择4种算法之一,求步长则用的是不精确一维搜索方法一
%主函数集成了4种算法,所用的初始点可由用户自定义,用于求解无约束优化问题。
%目标函数定义在程序末尾的fun函数中,其梯度定义在gfun函数中,海塞矩阵(阻尼牛顿法需要)定义在d2fun函数中。
function Ti1
clear,clc;
x0=input('函数和梯度表达式在本程序末尾设置,现在请确定一个迭代初始点,以列向量表示:\
x0='); %用户可自定迭代初始点,增强了算法的灵活性
disp('请输入数字选择一种算法:1-最速下降法;2-阻尼牛顿法;3-共轭梯度法;4或其他输入-BFGS算法');
choice=input('选择...'); %choice是特定的选择变量,能够决定程序执行哪个算法
kmax=10000; %最大迭代次数,避免算法无法收敛而一直进行
lambda=0; k=0; epsilon=1e-5; g=gfun(x0); %不同的方法在迭代前都需要的参数,其中lambda是迭代步长,epsilon是精度
switch choice
case 1
disp('选择了最速下降法'); %提示选择的算法,下同
case 2
disp('选择了阻尼牛顿法');
d2f=d2fun(x0); %阻尼牛顿法迭代前需要补充的参数,d2f即为海塞矩阵
case 3
disp('选择了共轭梯度法');
n=length(x0); s=zeros(n,1); mu=0; %共轭梯度法迭代前需要补充的参数,mu是确定下个搜索方向最关键的参数μ
otherwise
disp('选择了BFGS算法');
n=length(x0); H=eye(n); mu=0; g=gfun(x0); %BFGS算法迭代前需要补充的参数,H和mu分别为公式中的Hk和μk
end
while(k<kmax)
if(norm(g)<epsilon) %迭代停止准则
break;
end
switch choice %根据选择的算法确定搜索方向
case 1
s=-g; %最速下降法的搜索方向
case 2
s=-inv(d2f)*g; %阻尼牛顿法的搜索方向
case 3
s=-g+mu*s; %共轭梯度法的搜索方向
otherwise
s=-H*g; %BFGS算法的搜索方向
end
%求步长采用不精确一维搜索算法一,相比直接求解驻点方程和精确一维搜索更简单,运算也更迅速
c1=0.1;c2=0.5;a=0;b=inf;t=1;j=0;jmax=100; %一维搜索迭代参数设置
%其中t为存储步长的变量,最大步数jmax的设置是避免一维搜索无法跳出循环而一直占用计算资源
while(j<jmax)
if(fun(x0)-fun(x0+t*s)+c1*t*(gfun(x0))'*s>=0) %采用Wolfe-Powell准则
if((gfun(x0+t*s)-c2*gfun(x0))'*s>=0)
break;
else
j=j+1;a=t;t=min(2*t,(t+b)/2);
end
else
j=j+1;b=t;t=(t+a)/2;
end
end
%以上为不精确一维搜索算法一过程
lambda=t; %步长的确定
x=x0+lambda*s; %下一个迭代点的确定
%对最速下降法,已经可以进行下一步迭代,但对另外三种方法,需要更新参数
switch choice
case 1 %对最速下降法
x0=x; %更新迭代点的值,下同
g=gfun(x0); %求解新的梯度,下同
k=k+1; %进行下一次迭代,下同
case 2 %对阻尼牛顿法
x0=x;
g=gfun(x0);
k=k+1;
d2f=d2fun(x0); %阻尼牛顿法中海塞矩阵的更新
case 3 %对共轭梯度法
mu=norm(gfun(x))^2/(norm(g)^2); %共轭梯度法中μ的更新
x0=x;
g=gfun(x0);
k=k+1;
otherwise %对BFGS算法
dx=x-x0;dg=gfun(x)-g;
mu=1+(dg'*H*dg)/(dx'*dg); %BFGS算法中μ的更新
H=H+(mu*(dx*dx')-H*dg*dx'-dx*dg'*H)/(dx'*dg); %BFGS算法中H的更新
x0=x;
g=gfun(x0);
k=k+1;
end
end
if(k==kmax) %迭代超过最大次数仍未收敛,说明选择的算法收敛性不好
fprintf('算法在最大迭代次数,即%d步内仍未收敛\
',kmax)
fprintf('最后一步迭代的取值点为(%.4f,%.4f)^T\
请检查无误后换用收敛性好的方法继续进行!\
',x0(1),x0(2))
else %迭代在有限的步数内正常收敛
val=fun(x0);
fprintf('算法进行了%d次迭代\
',k)
fprintf('最终求得近似的最小值点为(%.4f,%.4f)^T\
',x0(1),x0(2)) %这里的输出样式适用于二元函数优化问题,n元函数相应扩充至x0(n)
fprintf('近似的最小值为%.4f\
',val)
end
%n元函数f(x),请将每个自变量按x的分量形式输入,如x(1),x(2)。
function f=fun(x)
f=100*(x(2)-x(1)^2)^2+(x(1)-1)^2;
%f(x)的梯度,请将每个自变量按x的分量形式输入,如x(1),x(2)。
function gf=gfun(x)
gf=[ 2*x(1) - 400*x(1)*(- x(1)^2 + x(2)) - 2; - 200*x(1)^2 + 200*x(2)];
%f(x)的海塞矩阵,输入形式同上,下面的这个函数对阻尼牛顿法特别重要。
function d2f=d2fun(x)
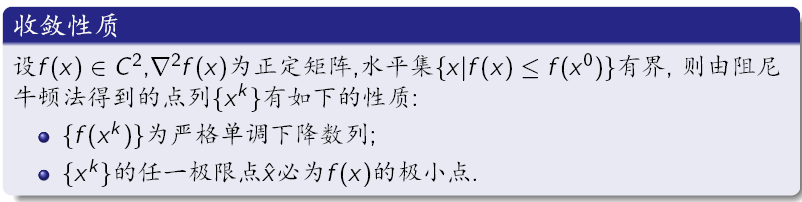
d2f=[1200*x(1)^2 - 400*x(2) + 2,-400*x(1);-400*x(1),200];通常的标准是使迭代中函数值逐渐减小,并且能收敛到极小点(思考:为什么不一定收敛到最小点?)
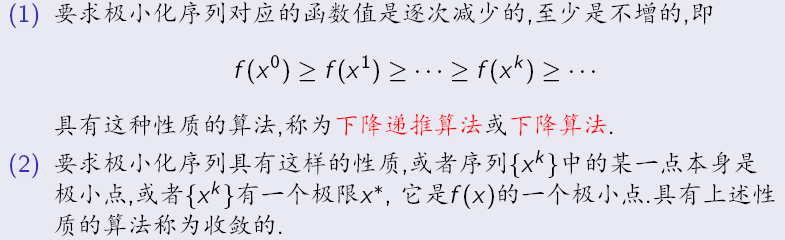
选择一个初始点(很重要,有的算法是局部收敛的),迭代法每一步都先求方向,后求步长,直到(连续函数最小值点通常梯度为0,即足够小)或其他条件

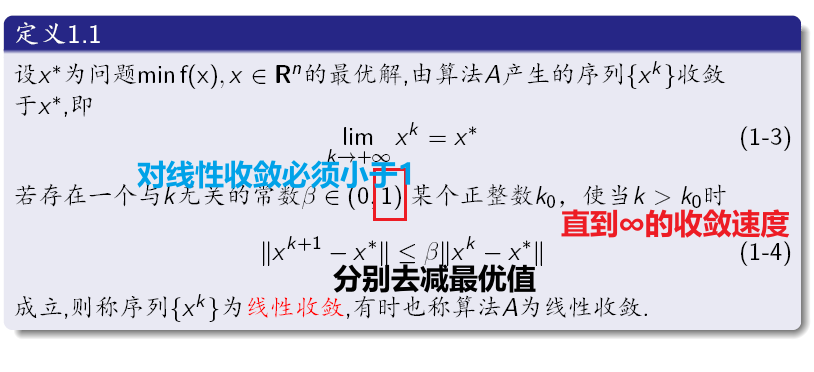
在掌握求方向和求步长的方法之前,应该先了解点列的收敛速度

有时迭代进行不下去了,前后两个点离得特别近,这时候也应该停止迭代,假如不是收敛到最优解,就应该换方法或者初值继续进行了

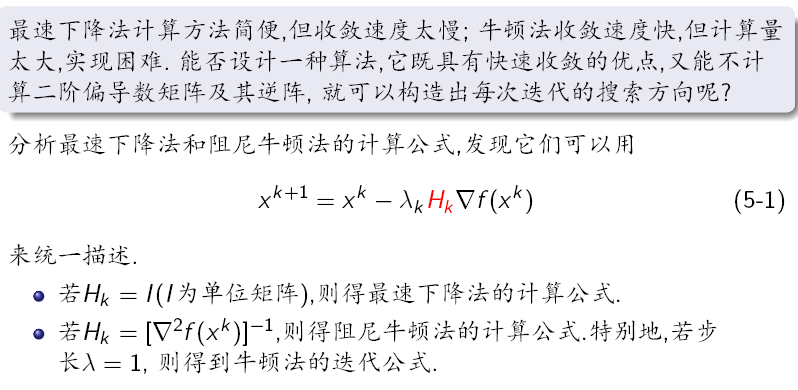
先来确定搜索方向,常用的方法可以选择:
- 最速下降法(又称梯度法)
- 阻尼Newton法(Newton法步长总为1,并入阻尼Newton法)
- 共轭梯度法(共轭方向法的一种)
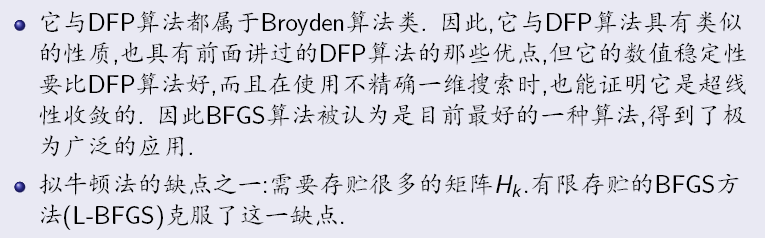
- DFP变尺度法(又称拟牛顿法,Huang类算法和自调节变尺度算法、BFGS变尺度算法是其变种,仅作了解)
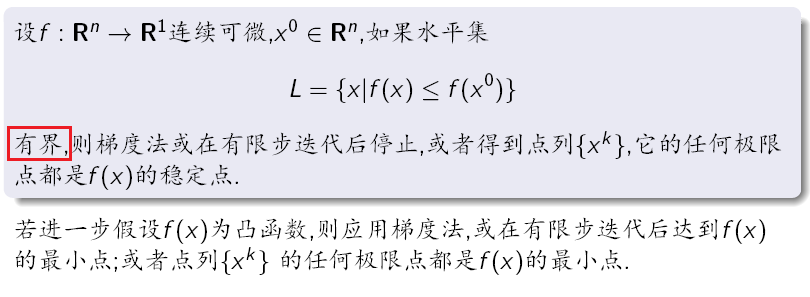
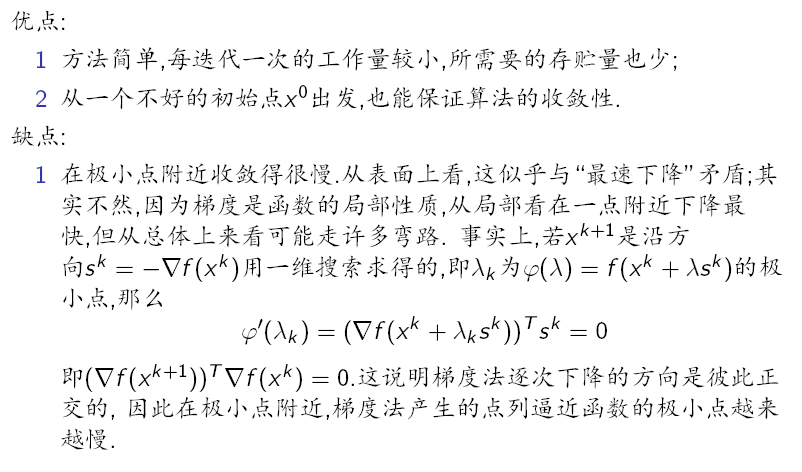
- 最速下降法
直接取负导数方向作为搜索方向:
迭代收敛的条件是:

2.阻尼Newton法
取负海塞矩阵的逆×导数方向作为搜索方向:
至少是二阶收敛,收敛更快
缺点是函数必须二阶连续可微,海塞矩阵及其逆矩阵还是比较难求的
如果直接定步长为1,不停迭代,就是一般的Newton法,它要求初始点必须接近极小点,否者迭代可能不收敛
3.共轭梯度法
在掌握共轭梯度法之前,我们要了解A-共轭、A-共轭方向,而共轭梯度是生成共轭方向的一种方法
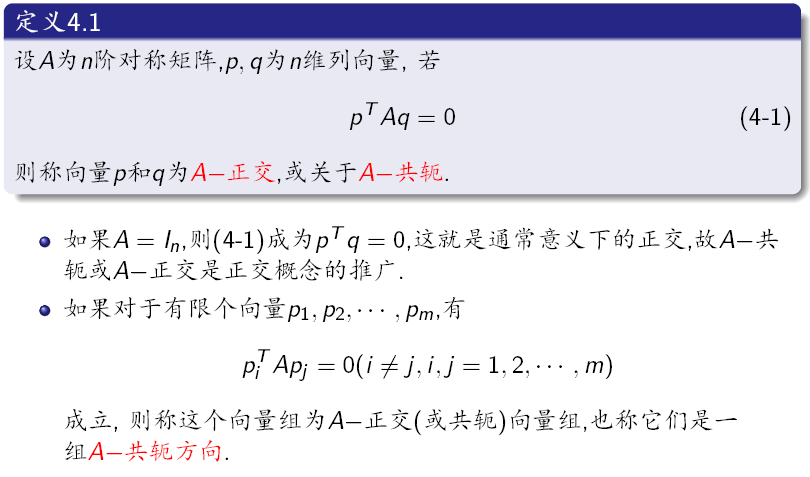


这种收敛很快,我们希望迭代过程中沿着共轭方向前进,并且这种方向在迭代过程中能够逐次形成,仍然需要利用上一个迭代点的梯度
调整搜索方向的公式可以写成

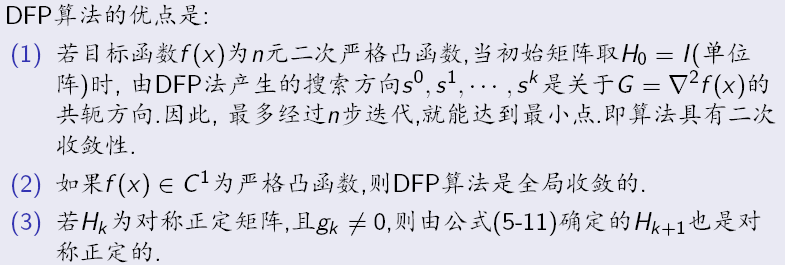
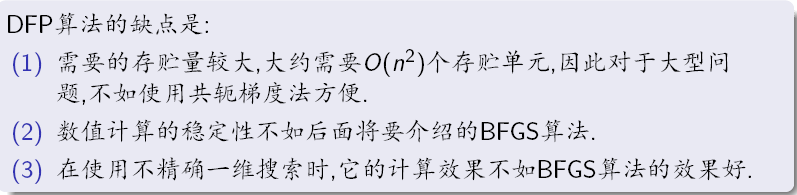
4.DFP变尺度法
调整搜索方向的公式可以写成

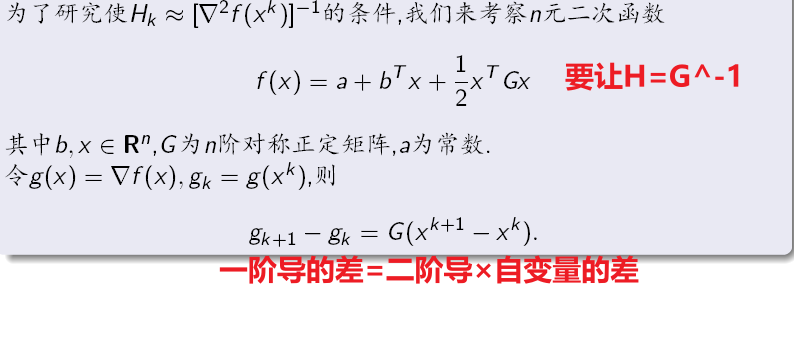
DFP算法是对称秩2算法,就是让
代入上面的式子,一些变量可以随便取,按下述取法就有了DFP的迭代公式:


现在,搜索方向 确定了,可以写出一个步长
的函数
,手算的话,求
的值就能得到步长的最优值
,然后
但是用计算机没法算,这是一个符号表达式,必须用数值方法(
)。计算机求步长的最优值所用的数值方法有:
1.精确一维搜索

2.不精确一维搜索:直接法和二次插值法
首先看精确一维搜索里使用导数的方法:
- (一维)牛顿法
迭代公式是(思考:为什么有二阶导),最终使
的自变量值取为


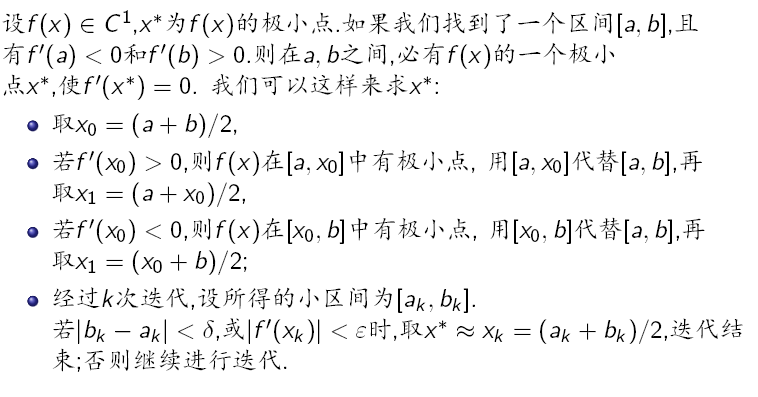
- 平分法
其实就是解方程的二分法罢了:
- 三次插值法
的最小值在
中,就利用两端点处的函数值和导数值构建三次插值样条函数(学过矩阵与数值计算就知道怎么办了),并以这个函数的极小值点作为


不用导数的方法有:
- 0.618法

- 成功-失败法

- 抛物线法


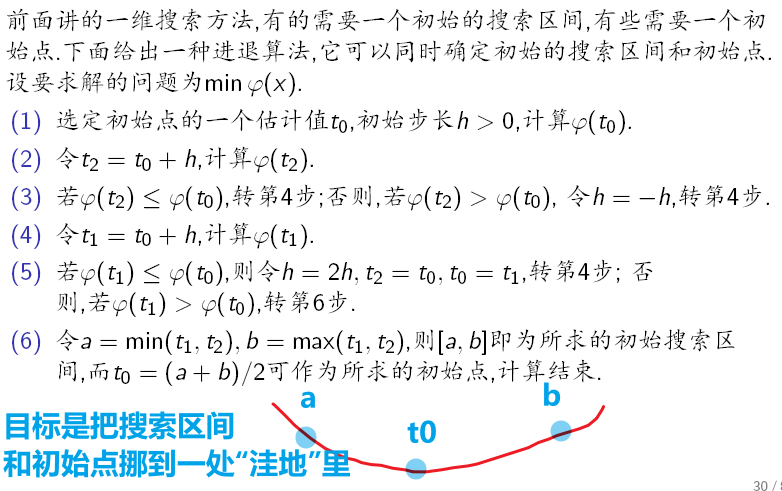
以上有的算法在开始前需要确定极小值所在的区间 ,可以用以下方法,作为了解:
最后是不精确一维搜索,不要求取 的极小值,而是下降到足够小即可:


上述可以写成Wolfe-Powell准则:

式中常数满足,常取

记住这样两件事:是负的;
越大,第一个式子期望函数值的下降越大,而第二个式子通常和
- 以下是直接利用W-P准则的不精确一维搜索算法一:

- 以下是用两点函数和其中一点导数构建二次插值替代原函数求极小值的不精确一维搜索算法二:



